
Introduction
When people choose a CCTV camera, they often start with one question: how far can this camera detect an object? It sounds simple, but the answer is not based on megapixels alone. A higher-resolution camera can help, but long-distance detection is really about how many useful pixels fall on the object you want to see. In surveillance design, this is usually measured through pixel density such as pixels per meter or pixels per foot.
That means a camera does not have a fixed “detection distance” just because it is 2 MP, 4 MP, or 8 MP. The actual performance depends on the camera resolution, the lens, the field of view, the width of the scene, the lighting conditions, and the size of the object in the image. Two cameras with the same resolution can give very different results if one is using a wide lens and the other is using a tighter lens.
Why Detecting Far-Away Objects Is Not Just About Resolution
A common mistake in CCTV planning is assuming that more megapixels always means better long-range detection. In reality, if a high-resolution camera is covering a very wide scene, the object may still appear too small in the image. On the other hand, a lower-resolution camera with a narrower field of view can sometimes provide better detail on a distant target. That is why surveillance planning focuses on pixels on target, not only on total pixel count.
Think of it this way: camera resolution gives you the total number of pixels, but the lens decides how those pixels are distributed across the scene. If the lens is wide, the pixels are spread out over a larger area. If the lens is narrow, the same pixels are concentrated on a smaller area, and distant objects appear larger and easier to detect.
The Key Metric: Pixel Density
The most practical way to judge long-distance detection is to calculate pixel density. JVSG explains it in a very simple way:
Pixel Density = Horizontal Resolution ÷ Scene Width
This is one of the most important ideas in video surveillance. If the scene gets wider, the pixels per meter go down. If the scene gets narrower, the pixels per meter go up. That is why field of view matters so much when you want to detect an object far away from the camera.
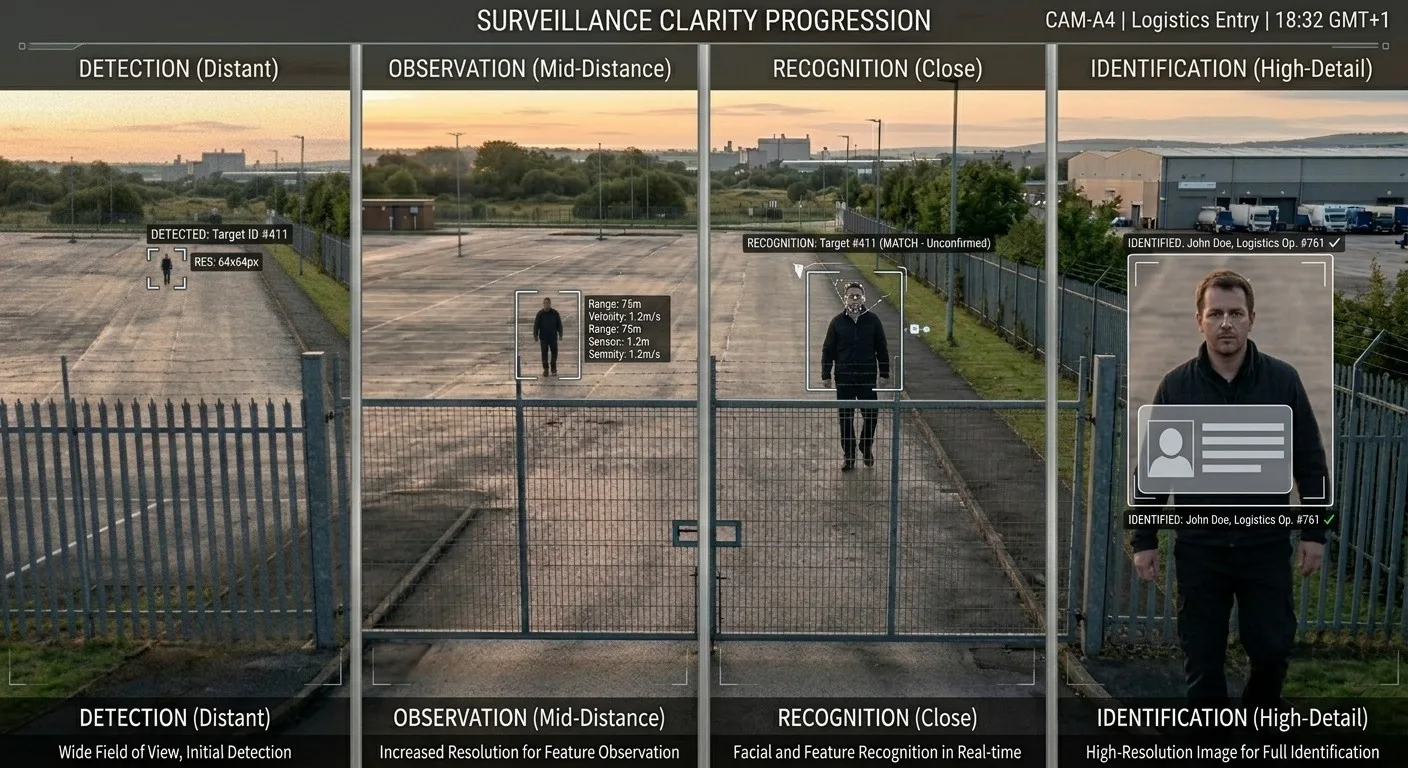
Detection, Observation, Recognition, and Identification
Not every camera application needs the same level of detail. In surveillance planning, one widely used model is DORI, which stands for detection, observation, recognition, and identification. Axis explains these levels and provides common planning benchmarks for each one.
Here is the simplified idea:
Detection means you can tell something is there
Observation means you can see basic features and movement
Recognition means you can tell whether it is the same person or type of object you saw before
Identification means you have enough detail to identify the individual or object with confidence
| Level | Typical requirement |
|---|---|
| Detection | 25 px/m |
| Observation | 63 px/m |
| Recognition | 125 px/m |
| Identification | 250 px/m |
Axis gives these commonly used pixel-density targets:
What Resolution of Camera Can Detect Objects at What Distance?
This is the big question, but the better way to answer it is to ask: how wide is the scene at the target distance, and how many pixels per meter does the camera provide there? Once you know the required pixel density, you can estimate how much scene width a given resolution can support. This section uses simple calculations derived from the DORI values above.
Approximate scene width a camera can cover while still meeting each level
| Camera resolution | Detection at 25 px/m | Observation at 63 px/m | Recognition at 125 px/m | Identification at 250 px/m |
|---|---|---|---|---|
| 2 MP / 1920 px wide | 76.8 m | 30.5 m | 15.4 m | 7.7 m |
| 4 MP / 2560 px wide | 102.4 m | 40.6 m | 20.5 m | 10.2 m |
| 8 MP / 3840 px wide | 153.6 m | 61.0 m | 30.7 m | 15.4 m |
These values are not fixed distance promises. They show the maximum horizontal scene width each resolution can support while still meeting the chosen level of detail. The actual detection distance will depend on your lens and field of view. A narrow lens can maintain those requirements farther away; a wide lens cannot.
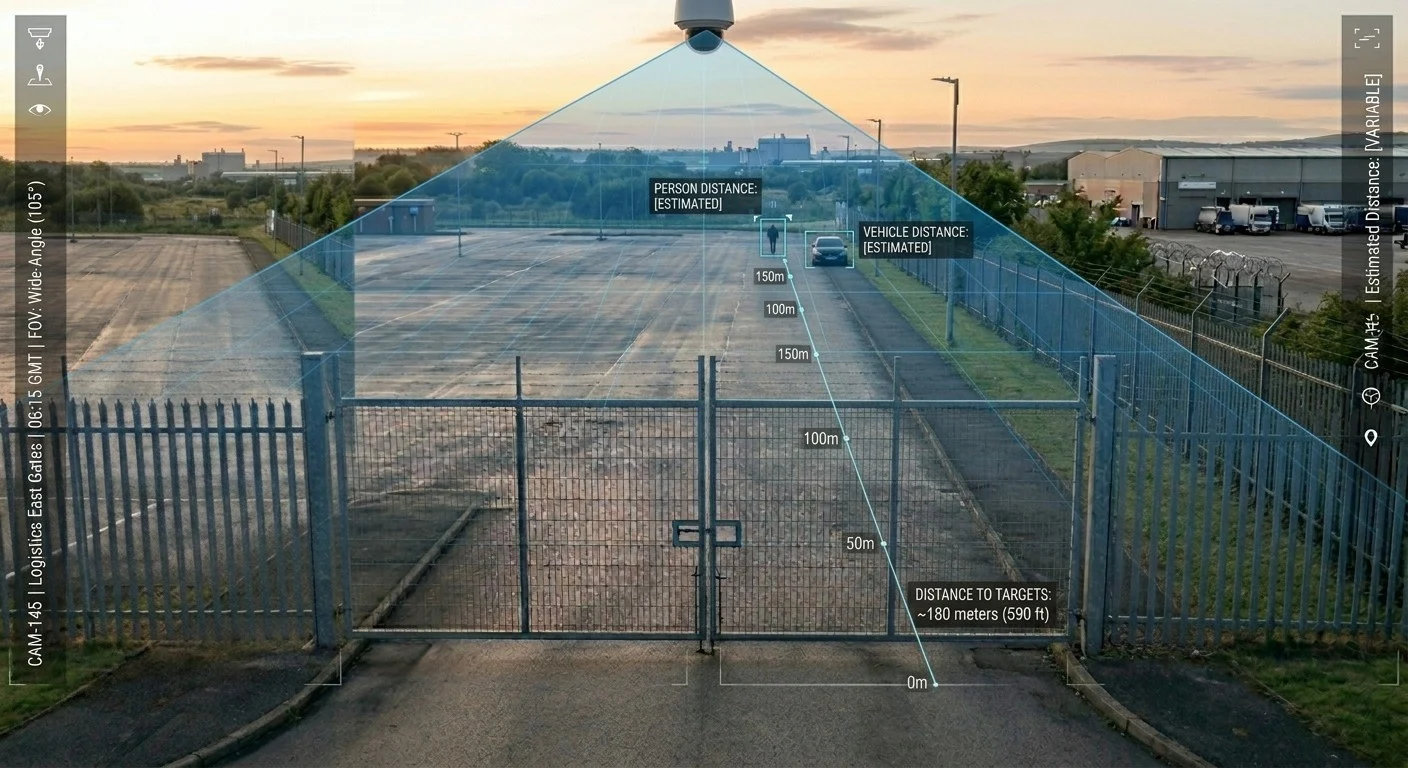
A Simple Example
Imagine you want to detect a person at a gate 30 meters away. If your camera is covering a very wide parking area, the person may occupy only a small number of pixels and appear as a tiny shape. In that case, even an 8 MP camera may not give reliable detail. But if you use a tighter lens and reduce the field of view to focus on the gate area, the person will occupy more pixels and detection becomes much more reliable.
This is why the right question is not only “Is 4 MP enough?” The better question is: at 30 meters, how many pixels will fall on the object after I choose the lens and field of view?
What Pixel Area Do We Need to Detect an Object?
This is another important topic, especially for AI video analytics and automated object detection.
There are two ways to think about pixels on an object:
1. Pixel density
This is the number of pixels per meter or per foot across the scene. It is the main way surveillance designers estimate whether a camera can detect, recognize, or identify a target.
2. Pixel area
This is the total number of pixels the object occupies in the image. This matters a lot in analytics systems because software often ignores objects that are too small. Bosch documentation states that any object with an area smaller than 10 square pixels in the analytics resolution can be discarded, and 20 square pixels is recommended as a minimum for object detection. Bosch also documents that some more advanced analytics functions may require much larger object sizes, such as 256 square pixels or more, depending on the algorithm and use case.
So when planning a camera for object detection, it is not enough for the object to simply appear in the frame. It must be large enough in pixels for the analytics engine or the viewer to interpret it properly. For general human viewing, pixel density is usually the main planning metric. For AI-based analytics, minimum object area becomes equally important.
Resolution vs Distance: What Should You Really Use?
Here is a simple practical guide:
2 MP cameras can still work well for basic detection if the field of view is controlled and the scene is not too wide.
4 MP cameras give more flexibility and are often a strong middle ground for practical surveillance projects.
8 MP or 4K cameras are useful when you need to cover a larger area while still maintaining enough detail, but they still need the right lens to perform well at distance.
In other words, resolution helps, but resolution alone does not tell you the detection distance. The final result is always a combination of resolution, focal length, field of view, target size, and scene width.
Why Lens Choice Matters So Much
The lens is what makes the practical difference in long-distance detection. JVSG’s field-of-view guidance explains that scene width depends on the sensor format, the focal length, and the distance to the target. In simple terms, a wide lens shows more area but gives less detail on distant objects, while a longer lens shows less area but gives better detail at distance.
That is why two 4 MP cameras can behave completely differently. One may be good for wide-area overview monitoring, while the other may be suitable for focusing on a distant gate, boundary wall, or entry road. The sensor resolution stays the same, but the lens changes how the pixels are used.
Common Mistakes in Long-Distance Object Detection
One common mistake is buying a high megapixel camera and expecting it to solve the entire problem. Another is using a very wide field of view and then expecting face detail or reliable analytics at long distance. A third mistake is ignoring the minimum object size required by the analytics engine. These planning errors usually lead to one outcome: the object is visible in the frame, but not in enough detail to be useful.
Good camera selection should always start with the operational requirement. Do you only need to know that a person is present? Do you need to recognize the person? Or do you need identification-level detail? The answer changes the pixel requirement, the lens requirement, and often the camera choice itself.
A Practical Way to Plan a Camera for Distance
A simple planning method is:
Define the target: person, vehicle, or intrusion
Decide the detail level: detection, observation, recognition, or identification
Estimate the scene width at the target location
Use the required pixel density to see whether the camera resolution is enough
Choose a lens that concentrates enough pixels on the target area
This approach works much better than choosing a camera by megapixels alone. It helps you match the camera to the real job instead of relying on general assumptions.

Final Thoughts
If you want to detect objects far away from the camera, the most important thing to understand is this: distance performance is not decided by resolution alone. It is decided by how many pixels actually fall on the object at that distance.
A higher-resolution camera can improve long-distance detection, but only when the field of view and lens are selected correctly. For human viewing, pixel density is the key planning factor. For AI analytics, minimum object pixel area also becomes very important. When these elements are planned together, you can choose the right camera for the right distance and avoid costly design mistakes.


